|
I am a new graduate from Chalmers University of Technology, MPSYS program. During my master, I spent more than one year at EPFL focusing on computer vision and machine learning. Currently, as a project intern, I'm helping Boschung & Autowise develop and test an autonomous sweeper. Before this internship, I did my master thesis in CVLab at EPFL, under supervision of Dr.Mathieu Salzmann and Dr.Yinlin Hu. |

|
|
My research interest lies in the areas of computer vision, machine learning and robotic perception. Most of my experience is within these areas. |

|
Programming Language: Python Software and Tools: Pytorch, Pycharm, OpenCV (1)Analytically and systematically evaluated the effectiveness of popular data augmentation methods used in deep 6D pose estimation. (2)From the view of geometric constrains, studied the impact of geometric transformations. (3)Further extended the thesis work by inventing a homography-based data augmentation strategy. |

|
Programming Language: MATLAB, C Software and Tools: Simulink, VSCode (1)The Linear Quadratic Regulator (LQR) was designed for the quadrocopter based on a discrete linearization of the mathematical model which later was tuned from simulations. (2)The final controller managed to stabilize the system and follow a reference angle of both zero and non-zero values. |
|
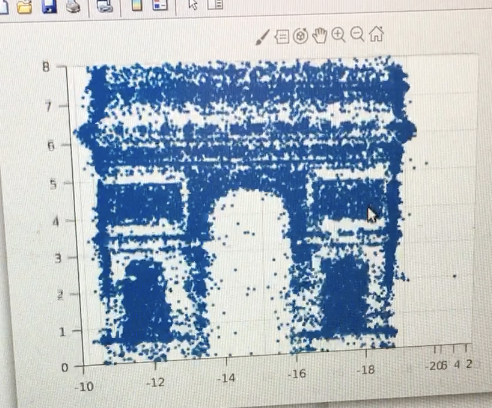
Programming Language: MATLAB Implemented the key componets of sparse 3D reconstruction from scratch, including 2D feature matching, RANSAC, refinement algorithm and etc. |
|
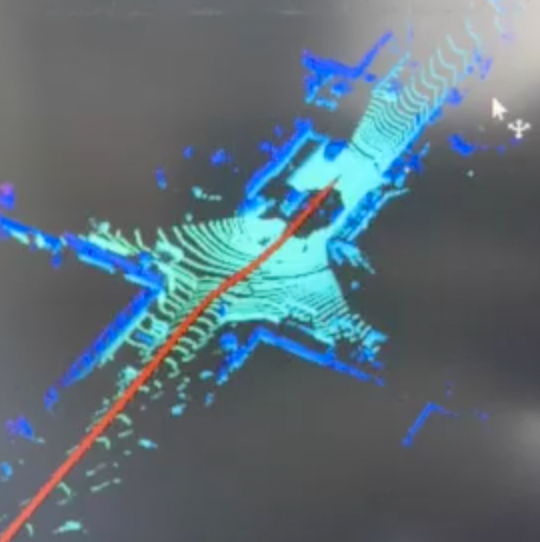
Programming Language: C++ Software and Tools: Eigen, Sophus, Pangolin, g2o Implemented bundle adjustment algorithm based on idea from direct sparse odometry. The main target was to minimize photometric errors among images. |
|
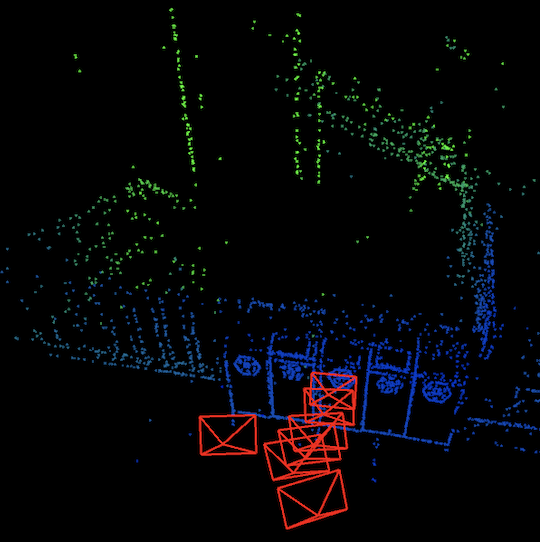
Programming Language: C++ Software and Tools: ROS, Ceres, Pangolin, Eigen, Sophus (1)This project was motivated by my current internship and previous knowlegde of sensor fusion course. The core algorithm development is still under going. (2)Sensors like LiDAR, IMU and camera would be considered. (3)The implementation is mainly evolved from state-of-the-art localization and mapping framework. |

|
Programming Language: MATLAB (1)Developed Extended Kalman Filter with measurement data from magnetometer, accelerometer and gyroscope.(2)Achieved good performance which was comparable to build-in Google’s orientation estimate. |
|
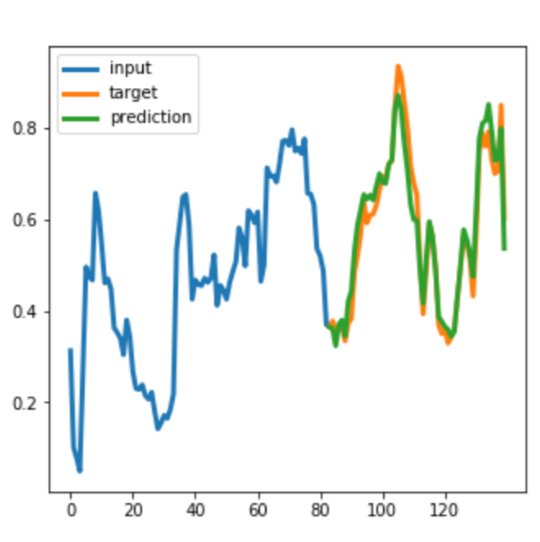
Programming Language: Python Partially reproduced the result of this paper and verified the effectiveness of "shape and time distortion loss" for training deep time series forecasting models with other neural network architectures and datasets. |
|
Programming Language: Python Studied rotation averaging and translation averaging problems included in the global Structure-from-Motion pipeline, with efficient solvers like interior point method and scaled-ADMM implemented. Relevant experiments were also conducted. |